In the world, the consumption of edible fish and shellfish is increasing rapidly. In 1965, the global average annual consumption of fish and shellfish on a crude food basis was 10 kg per person, but in recent years it has exceeded 20 kg. Japanese consumption increased to 72 kg around 1990, but in recent years it has fallen below 50 kg. Demand for fish and shellfish is increasing due to an increase in both per capita consumption of fish and shellfish and the world population. Until around 1990, most of the world's marine production was supplied by capture. However, 90% of fish stocks are considered to be overfished or sustainably maximally caught, making it difficult to increase production by capture. In fact, the increase in demand for fish and shellfish since around 1990 has been supported by aquaculture growth.
Aquaculture is divided into unfed aquaculture, which ingests nutrients and food in the environment such as seaweeds and shellfish, and aquaculture, in which juvenile are inserted in cages and fed with compound feed. Aquaculture using fish cages was developed in Japan and has become the standard method of fish cage culture in the world today. Until now, aquaculture has been mainly practiced in the calm coastal environment. However, in aquaculture using shellfish and fish cages, excrement causes eutrophication of the aquaculture area , resulting in lower productivity due to red tide and hypoxic water. Such disasters have also occurred in Norway and Chile, where salmon is farmed in the calm and deep fjord waters. whereas it has been said that excretion is likely to spread over a wide area due to the large water depth, and local eutrophication is unlikely to occur. In addition, many problems have occurred in coastal aquaculture, including the outbreak of diseases caused by parasites, so efforts are being made around the world to realize open water aquaculture. In our laboratory, as a technology to enable open water aquaculture, a feeding barge that is durable for the significant wave height up to 4m was developed in a new technology development project "offshore underwater aquaculture feeding system", the Ministry of Agriculture, Forestry and Fisheries from 2007 to 2009. Then large submergible cages were developed by revising the general cages with high-density polyethylene pipes in "Bluefin tuna aquaculture efficiency improvement project", Fisheries Agency in 2008 to 2012 and "Tohoku salmon trout aquaculture innovation", Ministry of Education, Culture, Sports, Science and Technology from 2012 to 2015. Then a controllable depth cage was developed in "New aquaculture technology development project utilizing environmental IT", Fisheries Agenc from 2016 to 2018 1 . However, in the world, new aquaculture equipment that is different from the conventional cages is being developed, and we will continue to develop a new technology with securing the safety of the cages and equipment, and establishing design standards 2 . Furthermore, with the development of the offshore wind power industry, the collaboration between offshore wind turbines and aquaculture cages has been attracting attention, and our laboratory investigates the mutual interference between floating offshore wind turbines and aquaculture cages3. Meanwhile, in coastal areas, productivity is declining due to rising water temperatures, red tides, the occurrence of parasites, and other issues. Therefore, we conduct research into a semi-closed sea surface aquaculture system4. This system uses a material that is impermeable to seawater instead of conventional nets, and cultivates fish by circulating deep seawater that is cold and has low concentrations of phytoplankton and parasites.In addition, these new aquaculture systems needs to be more sustainable. We analyze the surrounding environment of aquaculture 5 and utilize Integrated Multi-Trophic Aquaculture (IMTA), which allows other organisms to absorb the excrement of cultured fish for environmental conservation and increasing production 6 , to realize Sustainable aquaculture.
Another major issue is the aging of workers involved in the fishery industry. Fisheries and aquaculture are mainly operated in depopulated areas. There are concerns about productivity decline due to a decrease in fishermen and farmers, and negative impact on the local economy . In recent years, efforts have been made to replace the visual senses of fishermen and farmers with sensors and to make decisions by using Artificial Intelligence (AI). However, technology development to mechanize is still indispensable. By combining these technologies in a well-balanced manner, a next-generation fishing or aquaculture system will be realized. For example, set net fishery is one of the fishing methods that has a long history in Japan, but it requires a lot of workers to carry out the net-hauling work when harvesting a school of fish. It is an early morning and dangerous task, so automation is required. Conventionally, a method has been developed in which a buoyant body is provided under the box chamber net containing a school of fish and floated by air supply, but it is not widely used 7 . In our laboratory, with the support of Grant-in-Aid for Scientific Research B, we are researching a method of guiding a school of fish by providing a buoyant body inside the box chamber net 8 . We are aiming to develop a resource management type automatic fish school guidance and harvesting system combined with a fish school monitoring system.

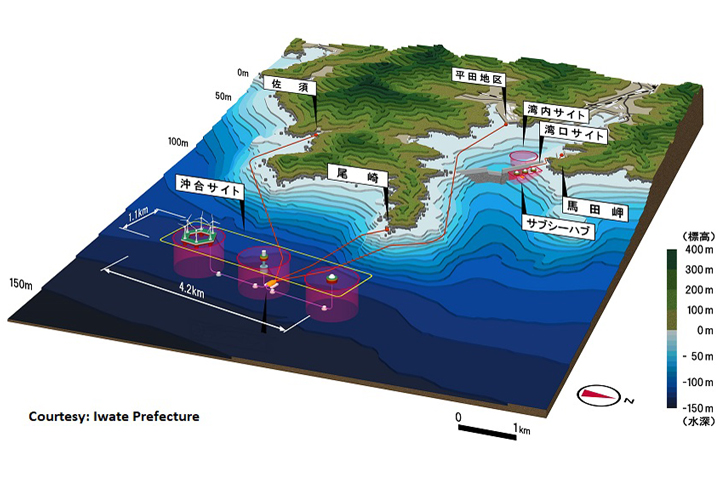
To enable offshore aquaculture, we research a system in which floating offshore wind turbines are used as a platform for aquaculture production, with fish cages being installed near the wind turbines. In particular, it is expected that the floating offshore wind turbines will serve as a platform for transporting compound feed to the fish in the cages. Regarding safety when floating offshore wind turbines and aquaculture cages coexist, we investigate how their mutual motion and mooring forces change. This research is being carried out with the support of the JST-Mirai Program Grant Number JPMJMI21C1 through the project "Development of Next Generation Sustainable Aquaculture System" and Grants-in-Aid for Scientific Research.

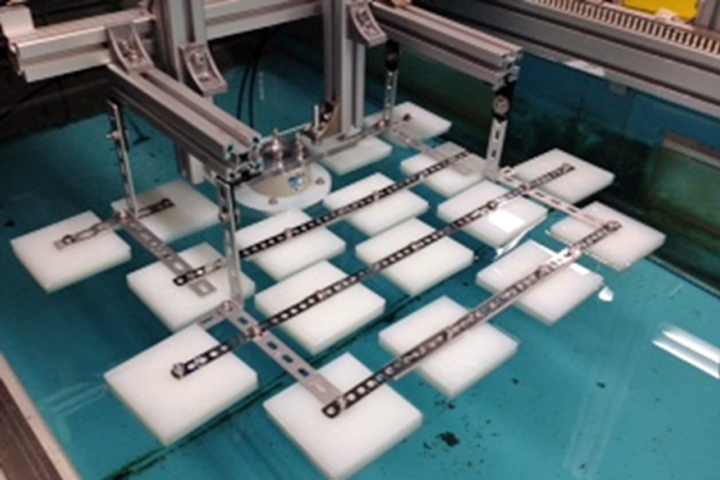
In recent years, the productivity of fish cage aquaculture in coastal waters has declined due to rising water temperatures, red tides, and the outbreak of parasites. Therefore, we research a culture system that uses impermeable materials for the cages instead of permeable nets, and circulates deep seawater that is low in temperature and has low concentrations of plankton and parasites. We evaluated the deformation of the cages and the load on the sheets through water tank model experiments, and conducted tests using sub-scale models in actual seawater. This research is being carried out as part of the JST-Mirai Program Grant Number JPMJMI21C1 through the project "Development of Next Generation Sustainable Aquaculture System".
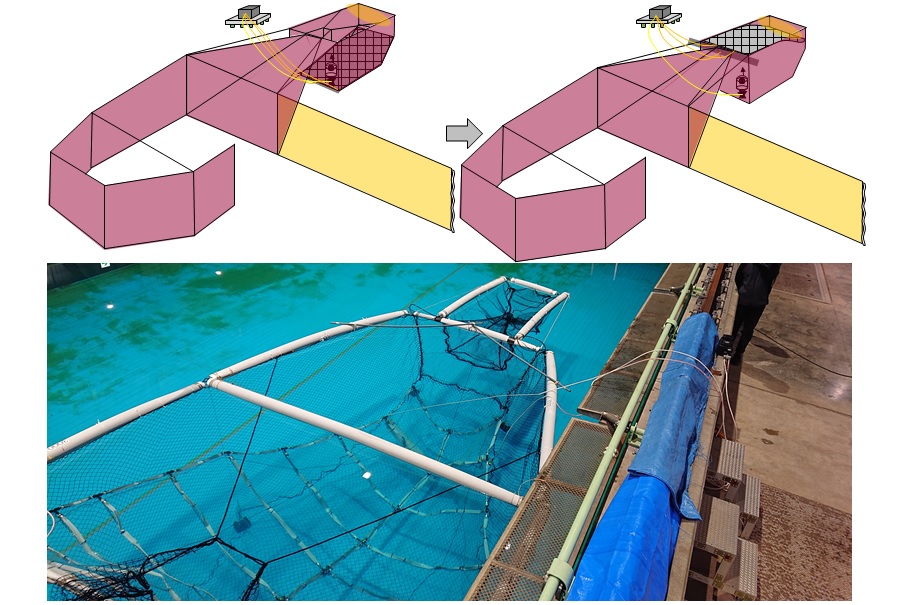
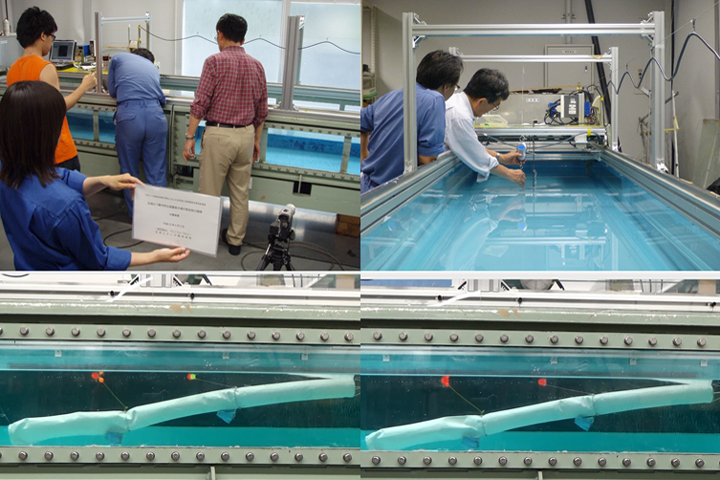
We research and develop an automated fish school guidance system with the aim of saving labor in set net fishery. Currently, harvesting fish that has entered the set net requires a large number of personnel and is a dangerous work in the early morning. To harvest fish automatically, air is supplied from one end of the floating and submerging structure created by connecting flexible hoses, and the fish are cornered as these structures rise. The final goal is to remotely observe the fish entry in the set net on land and to harvest by remote control considering fish resource management. Please see this page for details.
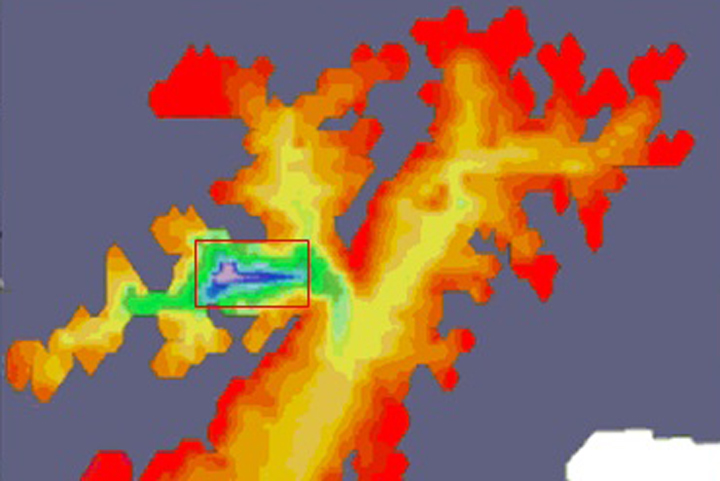
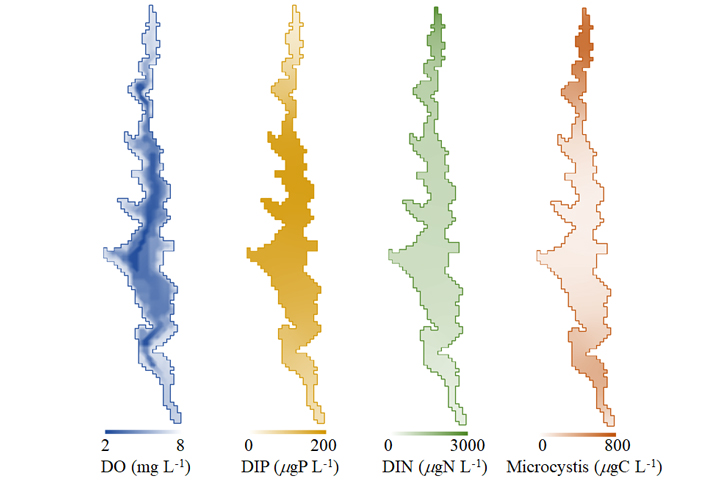
At aquaculture sites in protected areas of Japan, red tides and hypoxic water are generated due to excessive loading of nutrients from land or farmed fish (self-pollution). The aquacultural businees has been affected by the decrease in productivity because of environmental degradation. In order to understand the carrying capacity of the aquaculture, we are conducting a numerical simulation of the material cycle around the aquaculture area. In addition, as a method of preserving the environment of the farm, we are investigating the possibility of Integrated Multi-Tropyic Aquaculture (IMTA) in which excretion from farmed fish is utilized by another organism to achieve both environmental preservation and improvement of productivity. Please see this page for details.
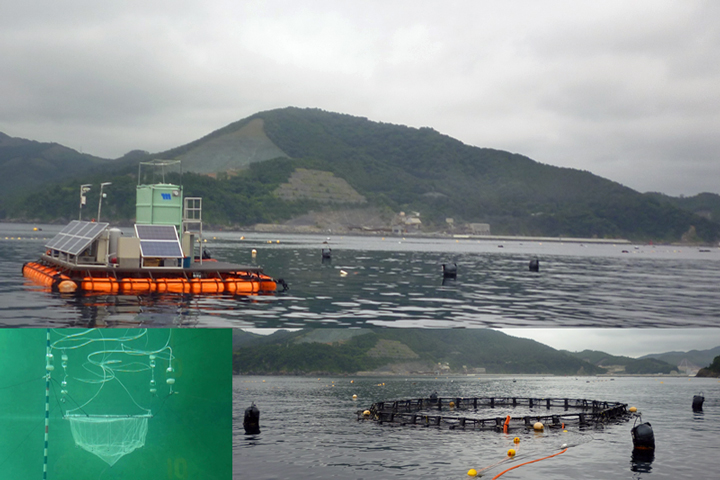
We have developed a controllable depth cage (CDC) that can be freely positioned in the vertical direction by changing the buoyancy of the intermediate float or cage. Normally, the buoyancy and weight of a cage are not balanced in the water, resulting in rising or sinking as a single body. However, in a mooring system using intermediate floats, the vertical position of a cage can be controlled at the position where the buoyancy of the intermediate float, the weight of the cage and the tension of the mooring rope are balanced. The vertical position of the cage can be adjusted in response to changes in the natural environment such as high waves, high water temperature, red tide, and hypoxic water. A sea trial was conducted in Onagawa Bay, Miyagi Prefecture. Please see this page for details.

For general cages composed of polyethylene frames, the cages can be reliably floated and submerged by injecting and exhausting air to and from the flexible hoses inside the polyethylene pipe. A sea trial was conducted in Onagawa, Miyagi Prefecture, where silver salmon are cultivated. However, since silver salmon die if the temperature exceeds 21 degrees for a long time, it is necessary to finish shipping by July when breeding in the surface layer. By cultivating silver salmon at a depth of 10 to 20 m, where the water temperature is lower, using a developed submergible cage, we succeeded in prolonging the aquaculture period and adjusting shipments. Please see this page for details.

Cages using high-density polyethylene pipes are widespread all over the world. When using this cage in harsh waters, the cage should have a submergible function. By replacing air and seawater in the polyethylene pipe, the cage can be floated and submerged. However, air and seawater cannot be replaced sufficiently since the polyethylene pipe is flexible. Therefore, we have developed a large submergible cage by improving the internal structure of the polyethylene pipe to smoothly replace seawater and air. We conducted a sea trial using a developed cage for tuna in Kashiwajima, Kochi Prefecture, and demonstrated that it can withstand high waves when the cage is submerged. This cage is being introduced overseas as well. Please see this page for details.

We have developed a barge that automatically feeds fish in submerged cages in an exposed sea. The construction cost including the mooring system will be expensive If the barge can withstand huge waves due to typhoon attack. Therefore, we evacuated the barge into the port if the significant wave height exceeds 4 m several times a year. The automated feeding system using this barge has made it possible to feed fish even when the significant wave height is about 1.5 to 4 m, in which feeding boats cannot approach the farming site. A sea trial was conducted at a yellowtail farm in Shibushi Bay, Miyazaki and Kagoshima prefectures.
Currently, the use of marine renewable energy has been increasingly expected, centered on offshore wind power generation. There are various renewable energy resources in the ocean such as offshore wind power, wave power, tidal current, oceanic current, temperature difference, salt difference, tide level, etc. We have focused on the use of wave energy since around 2013. As the output of a single device is not very large, we are keeping in mind the use of local energy production for local energy consumption. In particular, we develop a motion-controlled ship with wave energy harvester. Instead of consuming energy to suppress motion, we receive energy from the waves and use it as energy for propulsion and power while suppressing motion. We are thinking and aiming to realize a small ship that can go out to the ocean comfortably and freely using natural energy 1-2 . Compared to offshore wind power, wave power generation is rarely commercialized worldwide, but we would like to improve efficiency and spread it to society.
On the other hand, when installing a new marine renewable energy facility in the sea area, it is necessary to perform environmental impact assessment in advance. In addition, it is necessary to collaborate with prior users of sea area through surveys of the impacts on the environment and fisheries. Our laboratory has researched on environmental impact assessment of very large floating structures in the 2000s. Then we have decided to work on the environmental impact assessment of offshore wind power generation after we participated in the study group on the basic concept of environmental impact assessment for wind power generation facilities of the Ministry of the Environment from 2010 and Tohoku Reconstruction by Ocean Energy research group in 2011.
There are various environmental impact assessment items for offshore wind power generation, such as bird strikes, noise, and landscapes. Methods for investigating the impacts of marine renewable energy facilities on fisheries include actual gill net fishing, trawl fishing, grasping the behavior of marine animals using underwater video cameras and acoustic cameras, biologging to measure behavior by attaching sensors to marine animals, numerical simulation, etc. With the cooperation of Iwate Prefecture, our laboratory has been developing a marine organisms monitoring system using an underwater video camera since 2015. Initially, we considered a system to tow a container equipped with an underwater video camera on a fishing boat and take pictures, and to grasp the type and amount of fish school by combining information from fishfinders 3 . Then, we attached a circumferential fish-eye camera to the cylindrical container so that the monitoring system could be moved by the submersible pump installed on the container. We also confirmed the visibility with an underwater video camera using a fish model 4 . After that, a screw was used instead of a submersible pump as power, and the shape of the container became hemispherical. Furthermore, with the cooperation of the Hiratsuka City Fisheries Cooperative, we developed a catamaran unmanned boat Multi Mover Catamaran (MMC) in collaboration with Tokyo Kuei Co., Ltd. The MMC consists of two air tube floats, a rack that connects them, and two screws. It can move forward and backward with the thrust of the screw, and is characterized by good turning performance. The exhausted air tube float and rack can be folded into a small size, so it can be stored and carried in a case with a total of about 160 cm on all three sides. At the time of use, it can be easily assembled by using an air pump for bicycles. MMC can also be used for daily inspections of underwater structures, but will be used for monitoring sessile organisms and fish schools around marine renewable energy facilities in the future. We would like to analyze the images by using machine learning to clarify the fish reef effect of marine renewable energy facilities and the impact on marine organisms .
On the other hand, we are considering the environmental impact assessment of tidal current / ocean current power generation, wave power generation, and temperature differential power generation while we are working as a member of the International Energy Agency / Ocean Energy Systems / Environmental. In particular, the environmental impact assessment items for tidal current power generation and marine current power generation include the effects of underwater noise, the effects of electromagnetic fields, the fish reef effect, the effects of changes in the oceanographical field, and the involvement of marine animals in mooring ropes. Among them, collisions of marine animals to the blades of tidal or oceanic current turbine is one of the most critical risks, as are bird strikes in offshore wind power generation. There are numerical models, water tank experiments, and field observations as methods for predicting collisions of marine animals to turbines. Since the numerical model has been constructed for the collision of fish with the turbine blades of hydroelectric power generation, the size of the turbine blades and the extent of the water area around the turbine blades are different from those of tidal or oceanic current power generation. Field observations are the most reliable way to track a collision, but installing an underwater video or acoustic camera in a fast-flowing location can be difficult, labor-intensive, and costly. Therefore, as a method to support field observations, our laboratory is conducting water tank experiments to understand the behavior of animals around turbine blades. Although several tank experiments have been conducted in the world, our laboratory is considering similarity of water tank experiments regarding collision of marine animals to turbine blades . As the first assumption, we thought that the ratio of the tip speed of the rotating blade to the maximum swimming speed of marine animals would be roughly the same between the water tank and the actual sea area. The tip speed of the turbine blade during rotation can be obtained using the peripheral speed ratio designed from the flow velocity. There is an actual measurement result that the maximum swimming speed of marine animals is roughly proportional to the body length, and it can be predicted from the body length assuming the Strouhal number, the frequency and amplitude of the tail fin when the marine animal swims. Assuming the length of the turbine blades installed in the actual sea area and the body length of the marine animals, the fish to be used in the water tank experiment is determined. So far, when we observed the behavior of experimental fish in the vicinity while changing the rotation speed of the turbine blade, the fish tended to behave in the peripheral part rather than the center of the turbine blade, and collision with the turbine blade was hardly observed 5 . Even when the experiment was conducted using three types of fish, the behavior differs depending on the type of fish, but it seemed to avoid the turbine blades 6 . Also, when we experimented in bright and dark conditions, we did not observe any increase in the risk of collision due to dark conditions 7 . Despite the experiments in which the behavior of fish was observed by turning the turbine blades in a narrow channel, including experiments conducted in other countries, the collisions of fish with the turbine blades have been rarely observed. However, little is known about the relationship of the behavior of fish with environmental factors such as changes in seawater flow and turbulent flow due to the rotation of turbine blades, generation of underwater noise, generation of electromagnetic fields, light and dark conditions, and the presence of mooring ropes. It is very difficult to reproduce these environmental factors in the water tank, but it will be useful for understanding the behavior of marine animals observed in the actual sea area if we can clarify even a part of them in the future.
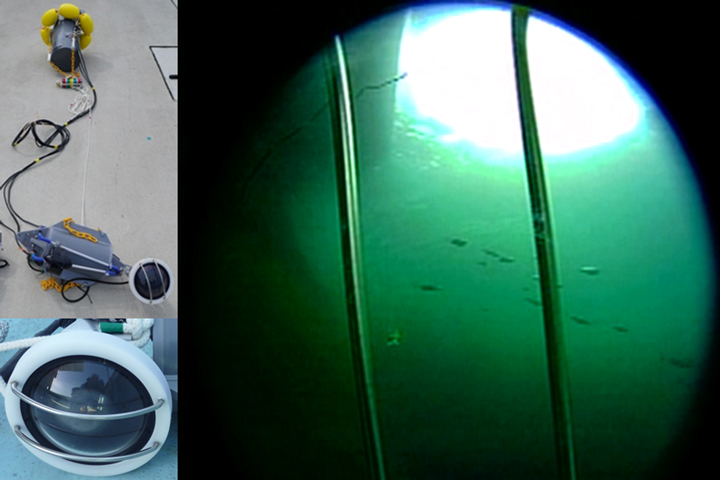
When installing marine renewable energy devices, the sea area for installation has to be licenced or permitted. For this, we have to investigate how the surrounding ecosystem will change due to the installation of the devices. Long-term monitoring of stationary underwater cameras is difficult due to the adhesion of sessile organisms on the lens. Surveys using AUVs and ROVs are expensive. Therefore, we develop on an inexpensive and portable monitoring system to observe the organisms that have gathered around the devices. Please see this page for details.
Environmental impact assessment is required when installing marine renewable energy devices. In terms of the impacts of tidal current and oceanic current power generation, there is concern about collision between marine animals and turbine blades in the same way that birds collide with turbine blades of wind power generation. We investigate the interaction between aquatic animals and rotating turbine blades changing the species of the animals and environmental condition. We join Environmental of the Ocean Energy Systems of the International Energy Agency. Please see this page for details.

We are developing a small boat that harvests wave energy and controls the motion. This small vessel consists of a cabin, suspension and floats, and can harvest wave energy from the relative motion of the cabin and floats. In addition, the suspension controls the motion of the cabin. The ratio of wave energy harvest and motion control can be adjusted freely. We built an experimental ship with a total length of 3.3 m and conducted sea trial off the coast of Yuya Bay in Yamaguchi Prefecture and off Hiratsuka in Kanagawa Prefecture. In the future, we would like to apply it to energy saving of fishing boats and to control of the motion of working boats, pleasure boats, sightseeing boats, etc. See this page and this page for details.
This research group was established after the Great East Japan Earthquake. A low-carbon city or region that is secure against tsunami disaster is proposed by exploring the path of "urban regeneration using marine space and ocean renewable energy". This is a field-integrated and cross-disciplinary research that goes beyond the conventional idea of separating land and sea. Not only researchers related to ocean energy, but also researchers from a wide variety of fields such as architecture gathered and discussed a low-carbon city with marine energy through symposiums. Please see this page for details (Japanese Only).
We have done some unique research using a small towing tank with wave maker and water circulation. Since it is a small tank, it is not possible to carry out experiments with high accuracy. But we can feel free to try various ideas, and sometimes conduct experiments using animals. These are conceptual experiments, but are published in peer-reviewed journals.
The possibilities of the Northern Sea Route (NSR) are expanding, and the demand for icebreakers is increasing with global warming. However, the hydrodynamic force on the icebreaker is not revealed well. For example, when measuring the force that an icebreaker receives from ice, we investigate the difference in force between when the icebreaker runs in ice and when it runs in water. But in reality, when an icebreaker runs in ice, the icebreaker first pushes the ice away, and then the ice moves the water. To obtain an accurate understanding of these processes, we measured the forces that individual ice exerts on the fluid.
In the Ariake Sea, hypoxic waters occur widely, and the impacts on shellfish have become a problem. In this research, we developed a system that supplies oxygen to hypoxic waters using an inexpensive and easy way for fishermen. Specifically, by towing the flexible hose at certain angle, the oxygen-rich seawater in the surface layer is supplied to the bottom layer. Shellfish close their shells and wait for oxygen to be supplied in anoxic waters, but the developed method allows them to temporarily obtain oxygen and breathe. Please see this page for details.
When installing marine structures, environmental impacts of the structures should be assessed in advance. On a larger scale, eutrophication and global warming are causing environmental problems in lakes and coastal waters around the world. Therefore, in order to elucidate the mechanisms of physical, chemical, and biological processes, we are developing a hydrodynamic and ecosystem coupled numerical model. This research has been conducted since the establishment of the laboratory, and the developed model was applied to Tokyo Bay, Lake Biwa, Lake Kasumigaura, the Caspian Sea, shrimp farming ponds, etc., to predict the effects of pollutant inflow and climate change on the ecosystem1-4. From the predicted results, we can consider the measures for environmental conservation. However, it cannot be said that a hydrodynamic and ecosystem coupled numerical model is fully utilized for environmental impact assessment. In the future, efforts for social implementation should be made, such as facilitating the identification of model parameters by machine learning using observation data.
Surface water temperatures have risen due to climate change. Lake Biwa experienced the losses of overturn in FY2018 and FY2019. The vertical circulation did not reach the deep layers even during winter seasons. If the overturn is insufficient, oxygen is not supplied to the deep layer, and the deep water becomes hypoxic. Such hypoxic water has a negative effect on living organisms. Using a hydrodynamic and ecosystem coupled numerical model, we predict the loss of overturn based on future climate change scenarios, and propose environmental risk finance to procure the cost of improving water quality.
When pollutants are detected in water, we have to immediately identify the source of pollution and take countermeasures. In this research, we used a reverse simulation that solves the governing equations in reverse in time. We investigated a method to suppress the instability of numerical simulation that occurs when solving the diffusion term in reverse in terms of time. Assuming the occurrence of the pollution problem in Lake Biwa, we conducted a reverse simulation to identify the pollution source. Please see this page for details.
In Lake Kasumigaura, changes in algae species and the outbreak of harmful algae with toxins have become problems. We included multiple species of algae in the hydrodynamic and ecosystem coupled numerical model, and investigated the cause of the change in algae species that occurred in Lake Kitaura. In addition, we introduced a toxin model into the hydrodynamic and ecosystem coupled numerical model to reproduce the occurrence of harmful algae with toxins by simulation. We discussed the environmental conditions when harmful algae grows.

In recent years, the loss of overturn has occurred in Lake Biwa due to climate change. In Lake Ikeda in Kagoshima Prefecture, the loss of overturn has been common since the latter half of the 1980s. The overturn occurred in the 2010s, however the loss of overturn has continued again. We research to elucidate the reason why the overturn does not occur by performing numerical simulation of water quality using a hydrodynamic and ecosystem coupled numerical model.
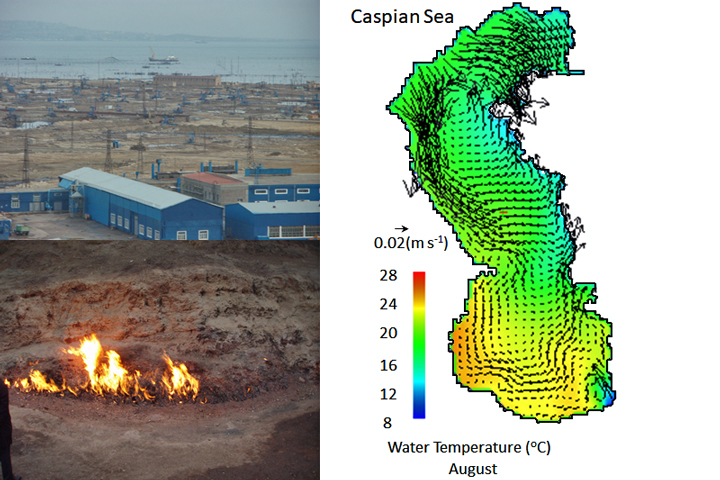
Oil and gas fields are being actively developed in and around the Caspian Sea. On the other hand, if oil pollution occurs in the Caspian Sea, there are concerns about its impact on organisms such as sturgeon that produce caviar. Therefore, in order to predict the diffusion range of oil when oil pollution occurs from the oil field, we conducted a numerical simulation of the physical environment. The circulation driven by the distribution of salinity and water temperature was reproduced. Please see this page for details.

Heda Mihama beach was rich in ecosystem in the 1950-60's. There were many kinds of shellfish in the beach. The number of shellfish has decreased sharply by adding mountain sand and expanding the beach. Therefore, we conducted field surveys and research on improvement methods with the aim of regaining the abundance of the ecosystem in terms of both the number of species and the number of individuals. See this page for more information (Japanese only).
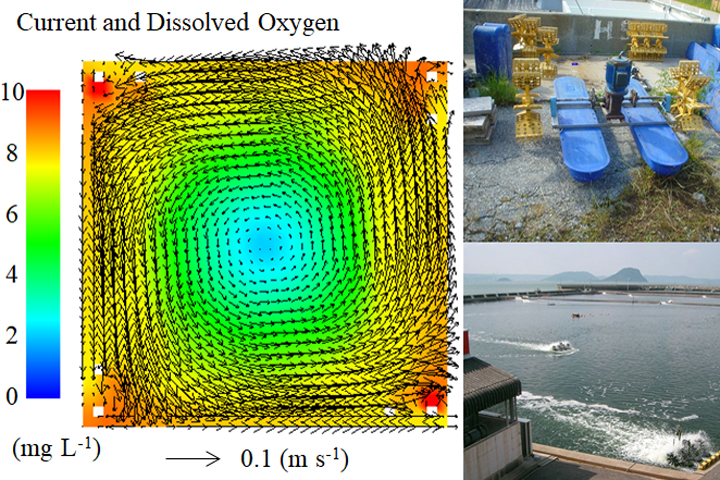
Shrimp farming is popular around Southeast Asia. Shrimp are cultured in a pond with a size of about 1 ha and a depth of about 1 to 2 m for 3 to 4 months before being harvested. In shrimp farming ponds, the concentration of dissolved oxygen decreases due to excretion of shrimp, etc. Using paddle wheel aerators, oxygen is supplied and sludge on the bottom of the pond is collected at the center of the pond to elminate it. In order to optimize the number and arrangement of paddle wheel aerators, we have developed a simulation tool using a hydrodynamic and ecosystem coupled numerical model. Please see this page for details.
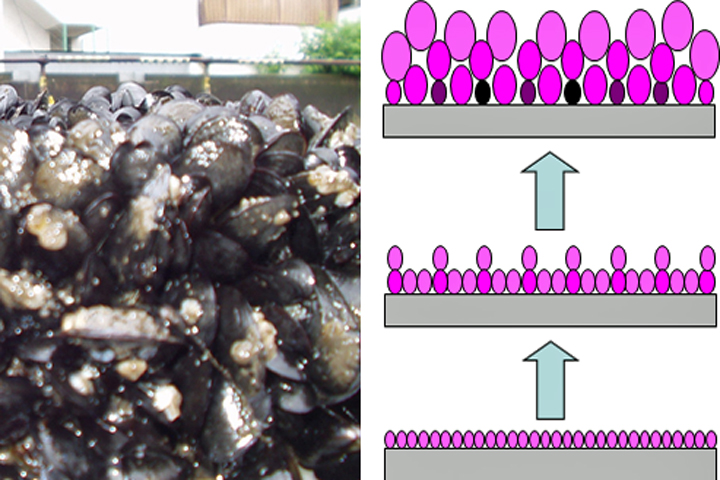
Sessile organisms can build up on artificial substrates with tens of centimeters thick. In order to understand the effects of sessile organisms on the surrounding water quality, active organisms and inactive organisms should be considered separately. Targeting the main sessile organisms, mussels, we estimated the proportion of active mussels by measuring the oxygen consumption rate of the mussel bed, and developed a competition model of mussels for space and food. We predicted the effects of mussels on the material cycle. Please see this page for details.
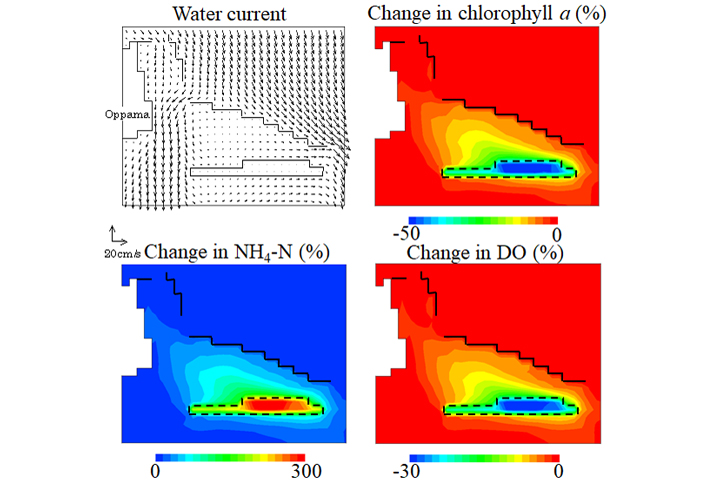
A very large floating structure (Mega-Float) is expected to be used for marine cities, runways, etc. However, the impacts of Mega-Float on the surrounding environment should be assessed in advance. Since Mega-Float floats on the sea, it is expected to have a smaller impact on the flow field than landfill. However, a huge shadow will be formed below Mega-Float, and primary production and water quality may be affected. Therefore, we have developed a hydrodynamic and ecosystem coupled numerical model for predicting the impacts of Mega Float on the surrounding environment. As a result, the sessile organisms attached to the bottom o Mega-Float installed in Tokyo Bay caused changes in water quality, whereas the changes were localized. Please see this page for details.
Electrochemical methods are attracting attention as one of the methods for protecting the water quality environment. Oxygen generated by electrolysis is supplied to hypoxic waters, and hydrogen is used as energy. It is also possible to decompose inorganic nitrogen compounds that cause eutrophication and red tide. Metallic electrodes are commonly used in electrolysis, but there is a risk that they will be consumed during use and ionized metals will be accumulated in aquatic organisms. Therefore, we are developing charcoal-contained electrodes and dielectric electrodes to reduce diffusion of materials from electrodes. We also research on the prevention of sessile organisms attached to fishing nets using electrochemical methods.
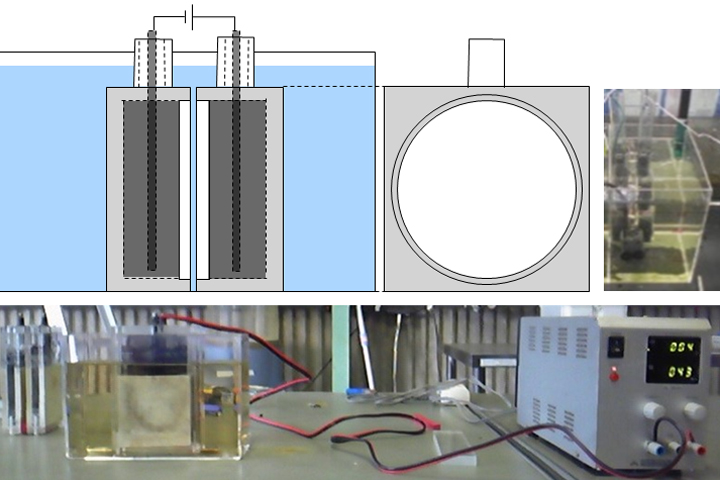
In order to develop electrodes that do not diffuse, we develop charcoal-contained electrodes that cover inexpensive charcoal with ceramics. If electrolysis is performed without encapsulating charcoal, the charcoal particles will gradually diffuse and the water will turn black and turbid. By electrolysis using a charcoal-contained electrode, the decomposition characteristics of ammonia nitrogen and other nutrients are investigated. The applicability of this electrolysis system to the treatment of polluted water is being investigated. In the future, we hope to apply it to the supply of oxygen and the production of hydrogen. Please see this page for details.
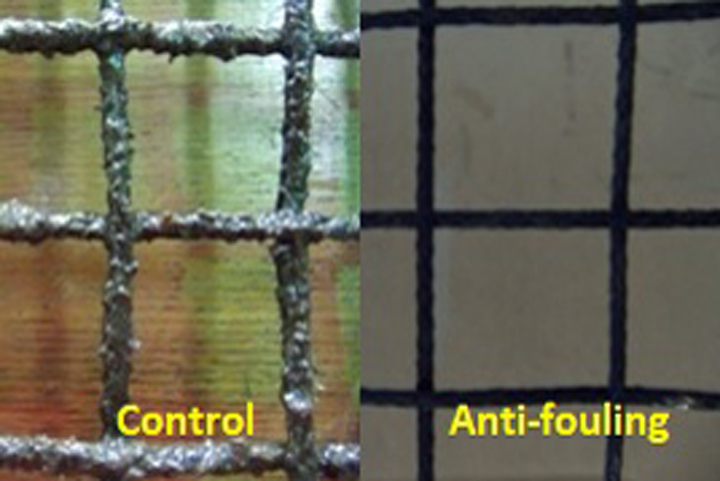
Many organisms adhere to fishing nets, and it takes a lot of effort to clean them. Anti-fouling paints are often used, but their impacts on the environment are feared and their duration is not so long. Therefore, we investigate a method of weaving a titanium wire into a fishing net to generate a small amount of hypochlorous acid by electrolysis to prevent biofouling from the fishing net. Please see this page for details.
